

Driverless:
more or less?
This book focuses on the possible impacts of the driverless revolution on cities and urban transportation, and investigate the extent in which the science of traffic engineering and transportation planning is struggling to keep up with the pace of changing cities in a technology driven and connected world.
It seeks to develop measurement tools and units that make it possible to rethink the traffic engineering toolkit and adapt principles to the expected changes and challenges, while aiming to achieve inclusive, equitable, and sustainable cities.
Driverless vehicles will disrupt our current transportation ecosystem on multiple fronts. Cities will be challenged with infrastructure planning, ethical values, and developing safety standards. The very principles for dimensioning public space, parking areas, roads and streets will be altered.
The concept of “more or less” is an exploratory exercise, a modest attempt, to predict the different facets of this revolution, to read and analyze the transformation process while considering both its negative and positive sides.
“In order to change an existing imagined order, we must first believe in an alternative imagined order.”
– Yuval Noah Harari
Sapiens: A Brief History of Humankind
Today driverless is all about vehicles technology & design
Driverless. Autonomous. Self-driving. Robot Cars. All are different terms currently used to describe vehicles capable of sensing and understanding their environment and navigating with limited or no human input.
Today, most leading auto manufacturers and tech companies are working on driverless innovations, with the major effort and focus is on the design of vehicles and the technological devices to improve their performance. Driverless vehicles are providing planners with a unique chance to rethink cities in regard to the automobile itself.
With this technology urban mobility will be revolutionized.
Bulky transport infrastructure such as parking facilities and depots, will be eliminated. The expected reduction of vehicles on the road will offer the possibility to humanize cities, prioritize people over cars, and dedicate more space to pedestrian activities and bicycling.
Today, most leading auto manufacturers and tech companies are working on driverless innovations, with the major effort and focus is on the design of vehicles and the technological devices to improve their performance. Driverless vehicles are providing planners with a unique chance to rethink cities in regard to the automobile itself.
With this technology urban mobility will be revolutionized.
Bulky transport infrastructure such as parking facilities and depots, will be eliminated. The expected reduction of vehicles on the road will offer the possibility to humanize cities, prioritize people over cars, and dedicate more space to pedestrian activities and bicycling.
The vision of the 50s
The very first vision for automated highways was revealed during the “1939 New York World’s Fair” attended by over 44 million visitors with “The World of Tomorrow” as the main theme. The installation “Futurama: Highways & Horizons” designed by Norman Bel Geddes and sponsored by General Motors Corporation received heightened attention from visitors. It included an automated highway system where cars travelled through trenchlike tracks: this was the first realization that highway driving lends itself to automation. This iconic poster was published in 1957 as an advertisement by America’s Electric Light & Power Company to show: “Highways will be made safe – by electricity” showing a family enjoying a board game in their self-driving car with accompanying text : “No traffic jam… No collisions… No driver fatigue”. An ideal depiction that is still relatable to many drivers commuting daily on congested roads around the world.
What has changed?
During the past decade, a substantial amount of effort has been put towards improving the design of vehicles and their technological features. Today the universal presence of Internet 4.0 links every person and object in a fabric pulsating with a unique pace. Tech companies have already started with the dynamic mapping of cities and seamless realtime data transfer makes it possible for vehicles to communicate with each other and with infrastructure to operate in real urban and inter-urban roads. With kilometers worth of completed test-drives both with and without backup drivers, these vehicles are gaining the trust of urban politicians around the globe to issue permits for test drives on their city streets and public roads, besides other road users. Their presence proves that mobility and mobility-related technologies could significantly influence the way people experience cities. This urges urban planners to rethink cities, public spaces, street design, etc. and urges transport planners to re-examine basic concepts of mobility such as daily commute, first and last-mile transport, delivery, and so on.
Is a hybrid future possible?
No significant changes will occur if the current mobility paradigm is not re-imagined.
The driverless revolution will be different in high-density cities and in low-density areas or suburbs. The experts’ opinion on the matter is divided into two main arguments. The first argument states that by freeing many of the spaces dedicated to cars from city centers, the cities will have the possibility to provide more affordable housing in the centers and therefore prevent urban sprawl. Densifying and diversifying city neighborhoods with different functions will consequently reduce the mobility needs since people will have access to services and amenities in their neighborhoods. The second argument is that by providing faster and more convenient travel options, people will move even further from the city center. Since the commute time from home to place of work can be spent as they wish, they might prefer living in the suburbs so they have the opportunity to purchase bigger homes, perhaps with larger gardens in comparison to the ones in the city center. Therefore, driverless vehicles might cause an even greater expansion of suburbs in more remote areas.
Fleet size dimensioning
One of the most important challenges for designers and planners is to forecast the mobility needs of a project. Typically, forecasting methods rely on historical trends and travel behaviours. However, the driverless revolution will profoundly impact the current transportation ecosystem, both in terms of behavioural changes, as well as, infrastructure changes. As a result, forecasting tools will have to be updated to account for changing travel behaviours, and trips that could include zero occupants.
Opportunities in the estimation and development of the driverless fleet and its management will create a new market for competition. Costs and efficiency of the system will depend on properly incorporating this new technology into an existing transportation ecosystem that’s been designed and built for private vehicles, and as such, have crafted our planning and forecasting methods.
In a complex ecosystem, it is beneficial to determine some of the variables that will most represent the size of the fleet. These 6 variables are not in a consistent equilibrium and change over time, but they influence each other. Based on the understanding of their mutual impact, we created a scenario with a plausible outcome to properly estimate the fleet size for any given development.
- The expected Resident and User Population of any given development is the starting point for determining the number of produced trips. A clear understanding of demographic aspects requires a thorough analysis of demographic trends, changing habits, household structures, etc.
- Modal Share is another key factor for the estimation of a driverless fleet and a determining component that governs the overall mobility dynamics. Modal share is both an outcome of policies and actions and an objective that each city predefines to itself. It is essential to provide options for both private and shared public vehicles in order to reach a balanced modal share and avoid over dependence on private cars, among which driverless cars may be.
- Higher Car Occupancy lead automatically to less vehicles on roads. It is necessary to implement policies encouraging higher occupancies in order to reduce congestion. A future without regulation through policy could lead to the travel of zero occupant driverless cars thereby increasing traffic loads, challenging traffic management schemes, increasing pollution, and leading to inefficient energy consumption.
- The same car can be used multiple times in an hour, depending mainly on the Car Ownership model. Challenging car ownership and encouraging private owners to share their cars is a crucial behavioural shift that will certainly affect the number of cars on the network and in their garages or driveways.
- Internal Capture is the estimated number of trips of a given site or mixed-use development based on complimentary land uses that support the range of trip purposes. These trips can be estimated to utilize infrastructure that supports shorter trips such as walking, biking, or micro transit. The estimation of this variable will be critical in determining fleet size internal capture in developments may range from zero (e.g. single land use developments) to 20% and above (e.g. mixed-use developments).
- Even in a controlled and connected system, the unpredictable Human Factor contributes to the efficiencies and inefficiencies of the entire system, such as delays caused by users boarding and disembarking times, users’ preferences on board that will be able to set some driving conditions (speed, acceleration/ deceleration, etc.). Introducing this concept early on will allow researchers to spend time measuring, analysing and quantifying these factors.
Car occupancy policies
Car occupancy and fleet dimensioning
A driverless future should be focused on the concept of sharing to promote higher occupancy rates. In order to provide an efficient and high-quality service, MaaS companies are exploring ways to forecast the variations of car occupancy during different times of the day as they begin to implement their car pooling programs. Accurate fleet dimensioning is essential to reduce the costs and provide a more accessible service for customers.
A different method to determine and increase the car occupancy rate is through the implementation of a dynamic pricing policy. Having a flexible pricing structure would allow for matching supply to demand. During peak hours, as travel demand surges, higher costs will encourage pooling of more passengers into a single vehicle. This allows fluctuation in person travel demand to be managed by the available seats in the driverless vehicles and not by an increase in fleet size. Price variations and carpooling should be managed by the service provider and operator in order to provide a continuous service.
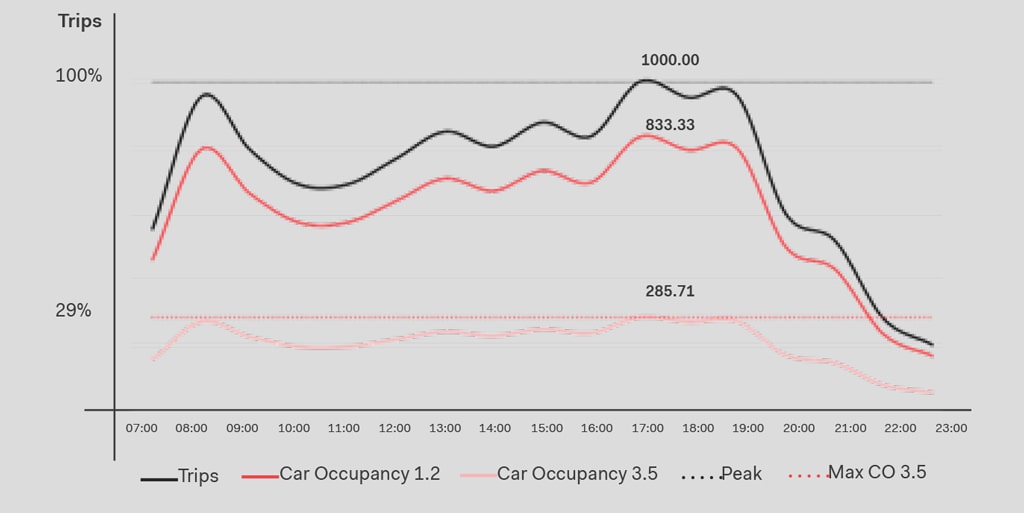
Car occupancy index
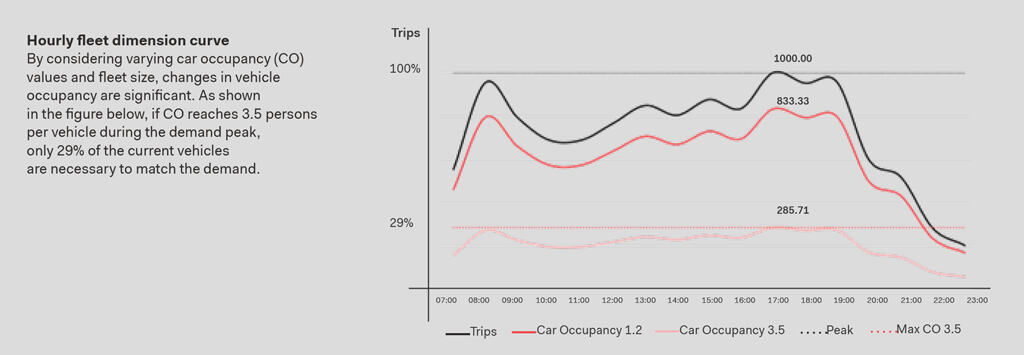
It’s possible to estimate the car occupancy rate by considering a scenario in which the large majority of trips are shared. By adopting a very optimistic car occupancy rate of 3.5 pax/vehicle during the peak hour, the required vehicles would represent 29% of the vehicles needed in the single passenger scenario. Keeping the number of vehicles dispatched on the road network fixed, the car occupancy rate for the rest of the day varies between 0.71 and 3.5 pax/vehicle.
A sensitivity analysis was conducted in which car occupancy was reduced to 2.5 on average during the day. This shows that car occupancy reaches a minimum of 1.9 pax/vehicle, which is still higher than the current average.
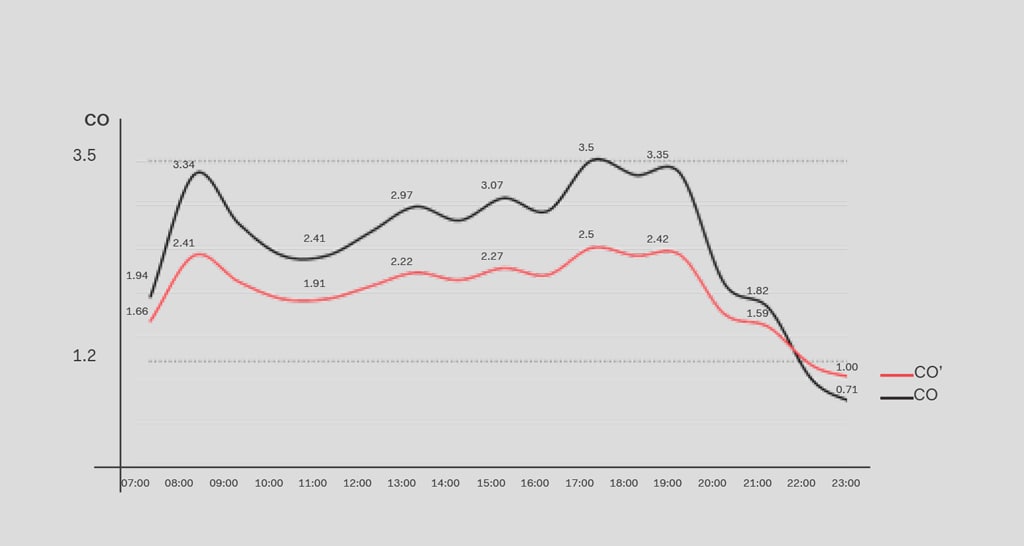
Hourly car occupancy values
The curve was further corrected in order to avoid car occupancy less than 1 during night hours as this implies vehicles are circulating with zero occupants. This might result in longer travel times during those hours, however, is considered to be essential for reducing the fleet dimension and avoiding inefficiencies.
Car occupancy and parking demand
By increasing car occupancy through a dynamic pricing system, it will be possible to accommodate different travel demand levels through a fixed and reasonably dimensioned fleet. As car usage is maximized, cars will be in motion during most of the hours of the day. As a result, the need for parking space will decrease while the need for drop-off and pick-up areas will increase. This will be achieved only if the fleet size is dimensioned appropriately and if travel demand and supply are matched through an efficient traffic management system.
The parking demand is directly related to the car occupancy rate: broader range of flexibility during the day would virtually eliminate parking needs. However, a stricter range would require different fleets designed to accommodate the demand during peak hours. The space saved from the reduced parking demand can be utilized to enrich and diversify land use, providing an opportunity to acquire higher revenues from the development and even reduce travel demand by providing alternative travel services.
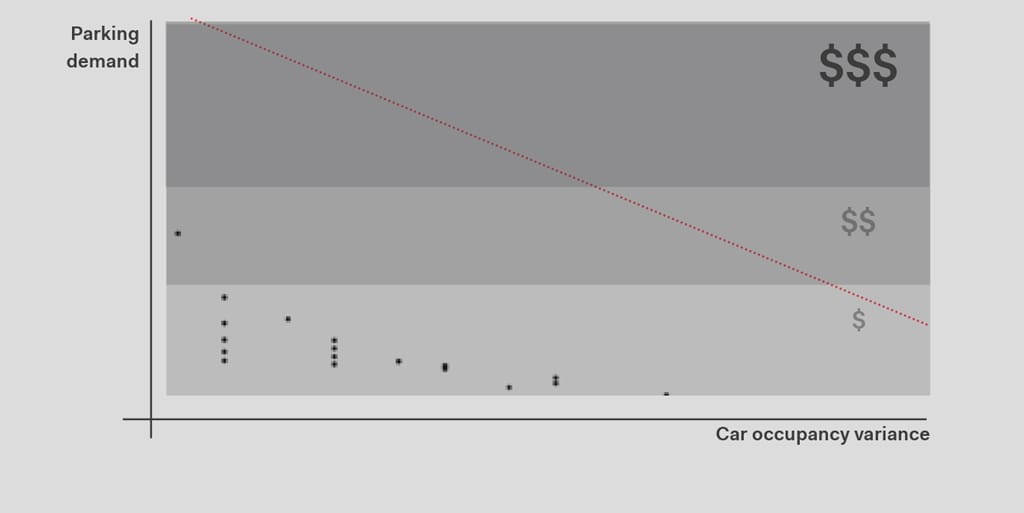
Correlation between car occupancy varianceand parking demand
With a high CO variance, the parking demand is very low since the fleet is always moving.
Car occupancy and travel demand
Currently the trends of car occupancy are mostly influenced by the quality of alternative transit modes and user behaviour rather than travel demand itself. However, the number of trips linked to car occupancy at a low rate usually translates into a rise in the number of trips, generating traffic congestion and increasing the need for new infrastructure to match demand.
The ideal scenario, to be reflected through appropriate policies, is to achieve the highest car occupancy while reducing the number of vehicles on the network. This will be a crucial objective for minimizing the space occupied by road infrastructure and freeing up cities for other functions.

Correlation between car occupancy and number of trips
With a low CO the number of trips becomes unsustainable due to the rise of traffic.
There are no predefined scales of intervention
There are no predefined scales of intervention and analytical limits; access to any given building is influenced by the deployment of driverless vehicles. While there is the promise for benefits such as improved safety by fewer collisions, reduced traffic congestion, less air pollution, social inclusion and cheaper urban transportation, there are challenges such as legislation, ethical concerns, cyber security, technological issues and most importantly restructuring urban fabric by altering and redeveloping street designs and public spaces for driverless vehicles access. Considering the diversity of urban fabrics, transportation availabilities, travel behaviour, and modal choices around the globe, there will be a wide range of systems for driverless vehicles.
HIGHDENSITY vs. SUBURBS
The driverless revolution will be different in high-density cities and in low-density areas or suburbs. The experts’ opinion on the matter is divided into two main arguments. The first argument states that by freeing many of the spaces dedicated to cars from city centers, the cities will have the possibility to provide more affordable housing in the centers and therefore prevent urban sprawl. Densifying and diversifying city neighborhoods with different functions will consequently reduce the mobility needs since people will have access to services and amenities in their neighborhoods. The second argument is that by providing faster and more convenient travel options, people will move even further from the city center. Since the commute time from home to place of work can be spent as they wish, they might prefer living in the suburbs so they have the opportunity to purchase bigger homes, perhaps with larger gardens in comparison to the ones in the city center. Therefore, driverless vehicles might cause an even greater expansion of suburbs in more remote areas.

PRIVATE vs. SHARED
Driverless vehicles raise a fundamental question about car ownership. If cars can arrive on their own when and where they are needed, will someone still buy a car and pay for its extra maintenance costs? Today, private cars are preferred as they provide their owners with reliable, flexible, comfortable and affordable modes of transport. These assets are the main challenges that driverless vehicles will face as they replace traditional cars and the private ownership model of vehicles.
The key challenge to a sustainable and inclusive urban mobility system is to move more people with less vehicles. High capacity public transport should remain a key component of urban mobility and the space previously dedicated to cars should be dedicated to active modes of transport, as they remain the cheapest, healthiest and most sustainable modes of transport. It is the responsibility of city politicians to ensure diverse and flexible mobility options with smart policies and integrated payment options. The business model of the future should change from “car ownership” to “service subscription”, which is highly reliable and affordable for everyone.

NEW DEVELOPMENT vs. RETROFITTING
Infrastructure projects typically have 30 to 50 year life spans, and some of them might become obsolete in half of that time, therefore while designing new developments and their related infrastructure it is crucial to consider some degree of flexibility in order to make sure they are adapted to the upcoming changes in mobility. Futureproofing that new development is a challenging task considering all the uncertainties around time and the type of changes faced, but at the same time, it guarantees fewer costs and faster adjustments in the future.The driverless revolution will provide cities with a unique opportunity to rethink their infrastructure, streets, and public spaces. During the past century, cities were auto-oriented in their design. With the driverless revolution they have the chance to become more people-oriented, providing safe, reliable and inclusive urban mobility, dedicating more space to public amenities and reducing their environmental impact. Retrofitting cities to adapt them to the upcoming changes in mobility trends is a gradual and ever-evolving process that will vary based on the distinctive characteristics of each city in terms of mobility dynamics, social, cultural and economic aspects.
")
{kind=link}
The driverless revolution has begun. The harbinger are the vast number of start-ups and technology firms innovating vehicle designs and ideas. The estimate is by 2021 fully autonomous vehicles will be available. This prediction relies heavily on the approval of regulation, however, as driverless vehicles deploy, how will cities respond? Cities with established policies to properly guide the transition will likely be the most successful. This is evident with the deployment of the e-scooter. When BIRD launched in Santa Monica in 2017, it was done by rolling out scooters in an impromptu manner. Soon sidewalks and streets were flooded with scooters and city officials were left with citizen complaints, injuries, and policy that didn’t offer regulations. However, when mobility companies work with cities to launch with permission and have the necessary permits it can be the difference between success and failure. While this technology has some time before deemed a success, there is no arguing with the demand from people using scooters for last-mile type trips. The same will be true of driverless vehicles. The technology is progressing faster than regulations and guidance, and there will be early adopters that will embrace the technology, even if there are some risks with the technology. In the Milan Driverless perspectives article, we created a scenario that would consider the impact of driverless vehicles on a city such as Milan where the city is defined by historic architecture. This type of planning will be necessary for all cities as they begin to envision their communities and cities with a new mode of transport that will disrupt everything from planning methods to infrastructure design.
When we have a new technology, we take it on very quickly. Consider the telephone took nearly 75 years to be in 50% of households but just 10 years for 80% of households to use smartphones. We adopt technologies faster in part because the infrastructure for newer technologies takes less time to construct. The question remains in how a technology like driverless vehicles will be adopted and if the infrastructure will be in place to support the cascading effect the technology will cause. In the United States, it’s estimated there are between 1 and 2 billion parking spaces the cost of which can range between $5,000 to $10,000 for surface parking and $25,000 to $50,000 per space for structured parking. A number of studies show we need 10%-15% of this parking. So how will parking change if AV’s change how we move? In Chapter 3, Parking Demand, we illustrated various parking strategies based on vehicle ownership models. No longer in need of parking, we’ll be able to build more densely and repurpose infrastructure. This is a complete shift in how our land functions in urban areas and just one of the cascading effects the driverless revolution will bring. If our current rate of adoption to new technology holds true, when driverless vehicles become available, we will take it on very quickly.
At the time of this writing, the COVID-19 virus was spreading across the world infecting millions of people. There was no immunity from the virus, major cities were forced to lockdown to limit the spread, at the same time stymieing economies and causing dramatic decreases in transportation movement. The effects of the virus are still being felt and many cities are discussing how we return to the new normal and raising questions on what the future of transportation looks like amidst the COVID-19 virus, future viral infections, as well as, climate change. Early evidence suggests mode choice will change among those who have the option to use private vehicles, rather than using bus or subway for their trip, as people consider their health and are more conscious of social distancing. The virus outbreak reinforces the need for planning methods and tools to account for disease outbreaks among the considerations of resiliency and driverless vehicle forecasting. The ideas presented throughout this book consider the technologies, methods, and design considerations the driverless revolution will bring, but now, we’d be remiss to discount the impacts COVID-19 has brought forth in our future transportation planning and the changes that will occur over the coming months and years. However, this next revolution in technology and focus on health will be the time to reimagine our cities together, in partnerships that consider the reshaping of the landscape and the creation of a better transportation future.